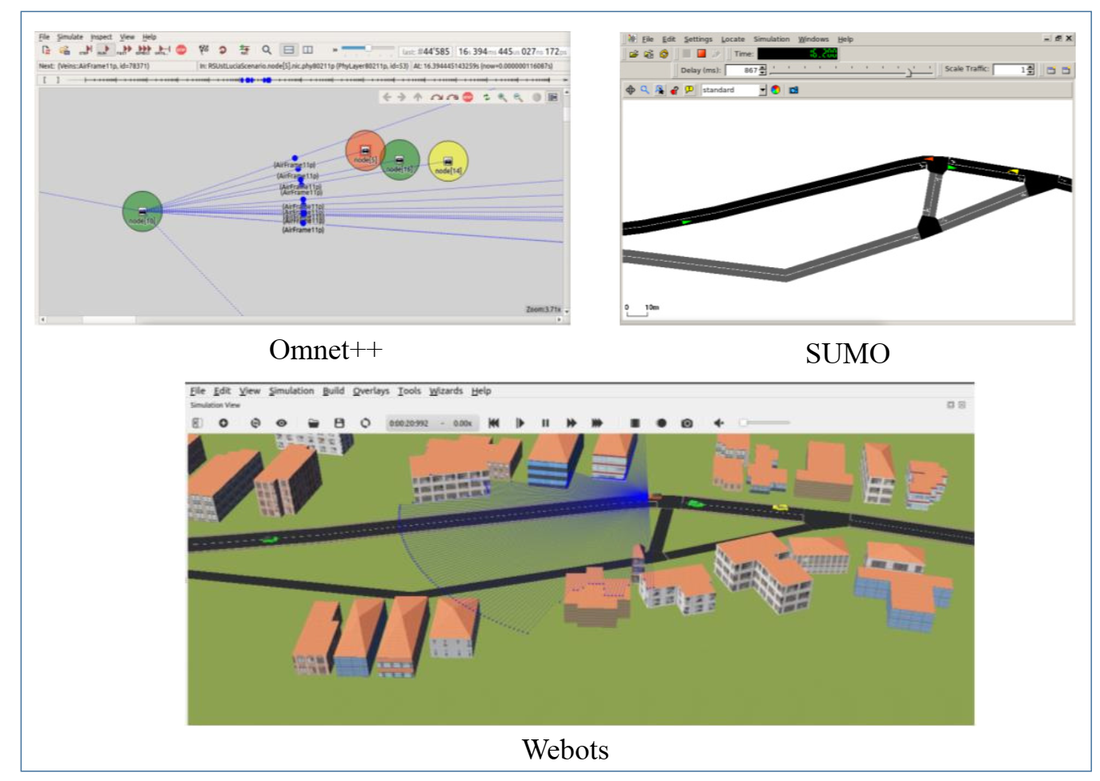
SimCCAD is an open-source integrated simulation platform for Conventional, Connected and Automated Driving (CCAD). SimCCAD consists of three core components: vehicle model, traffic dynamics/environment, and V2X communication, and is based on three popular open-source simulators SUMO, a road traffic simulator, Omnet++, an event-based network simulator, and Webots, a robots simulator. SimCCAD integrates the three simulators which can run in parallel via the information synchronization.
To know more about this simulation platform, please read our TR Part C paper.
To know more about this simulation platform, please read our TR Part C paper.
SimCCAD Framework
SimCCAD framework is built from the cyber-physical systems perspective, in which the core components of V2X communication, traffic networks, and autonomous/conventional vehicle model are tightly coupled. The whole simulation platform is deployed in a physical Client/Server model, where Webots works in a client desktop computer, and SUMO+OMNET++ works in a high-performance server computer, as shown in the following figure.
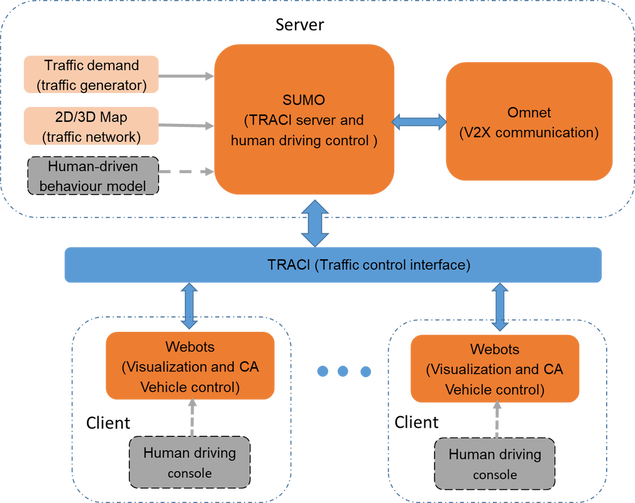
In the client side, Webots is used for physical vehicle modelling and automated driving controller design. Webots functionalizes the core components of a typical AV including Lidars, cameras, powertrain, and the implementation of common AI algorithms. To support human-machine interaction, the hardware of driving force wheel and pedals set and VR (Virtual Reality) headset (human driving console) can optionally be installed to the Webots to allow the whole simulation platform working as a typical driving simulator.
In the server side, SUMO is used for generating traffic networks and realistic traffic demands. By taking advantage of the embedded car-following/lane-changing models, SUMO can easily generate large-scale conventional vehicles over traffic networks. Customized human-driven behaviour model can be easily extended in SUMO. Specifically, SimCCAD develops a new car-following model for connected and human-driven vehicles. OMNeT++ is used for constructing a connected environment which supports popular V2X communication protocols such as IEEE 802.11p and LTE-V2X.
In the server side, SUMO is used for generating traffic networks and realistic traffic demands. By taking advantage of the embedded car-following/lane-changing models, SUMO can easily generate large-scale conventional vehicles over traffic networks. Customized human-driven behaviour model can be easily extended in SUMO. Specifically, SimCCAD develops a new car-following model for connected and human-driven vehicles. OMNeT++ is used for constructing a connected environment which supports popular V2X communication protocols such as IEEE 802.11p and LTE-V2X.
Information synchronization in SimCCAD
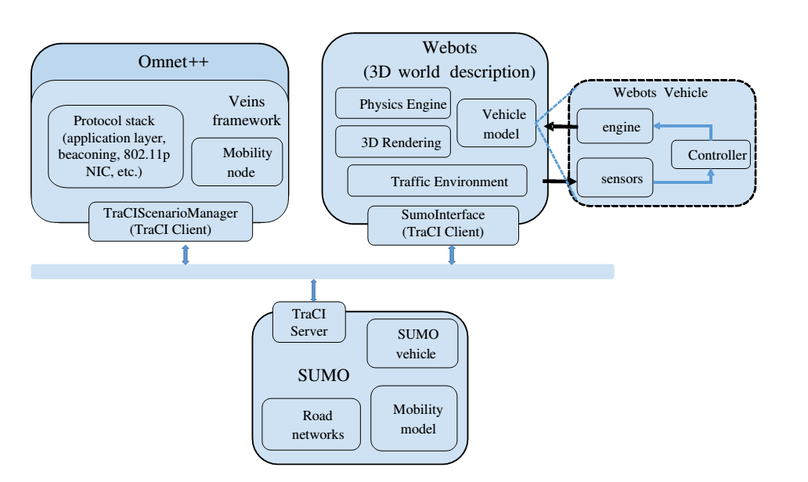
SimCCAD adopts Traffic Control Interface (TraCI) for communication and information synchronization among SUMO, Omnet++, and Webots. TraCI uses a TCP based client/server [1] architecture to provide access to SUMO. To interact Omnet++ with SUMO, Veins [2] is applied which designs a module of TraCIScenarioManager to bi-directionally couples the two components. SimCCAD extends the module function to support more information types exchanged between SUMO and Omnet++. To build up the communication between Webots and SUMO, the module SUMOInterface is used in Webots which is written in Python in a Supervisor controller. some new functions are developed in SimCCAD to better support V2X information exchange as well as the 3D visualization of vehicle's movement.
When implementing information synchronization, the clients Omnet++ and Webots are not allowed to communicate to each other directly in SimCCAD, and all vehicles’ information is stored in the server SUMO.
[1] This is different from the Client/Server model defined in system deployment.
[2] https://veins.car2x.org/
When implementing information synchronization, the clients Omnet++ and Webots are not allowed to communicate to each other directly in SimCCAD, and all vehicles’ information is stored in the server SUMO.
[1] This is different from the Client/Server model defined in system deployment.
[2] https://veins.car2x.org/
Examples
1. Mixed traffic flow on a 3D road map
|
In this example, we demonstrate how to simulate a mixed traffic scenario by SimCCAD. The short video clip shows human-driven vehicles (in yellow), connected vehicles (in green), and connected and autonomous vehicles (in red) run in a 3D road network. Beacon messages are periodically disseminated among V2V communication supported by Omnet++. |
|
2. Look-ahead Eco-driving for AV
|
The short video clip demonstrates eco-driving of autonomous vehicle (AV) adopting look-ahead driving strategy, which adjusts AV's speed based on the on-board sensors’ perception of preceding traffic conditions. heavy traffic demand is created by SimCCAD. To let the AV stay its own lane and avoid collision with the surrounding vehicles, a camera to recognize the road line and Rear range sensors to detect the gap to the neighbours are installed on the AV. |
|
Trial Version Release
As the first step towards the stable open-source simulation platform, we are now releasing the trial version ( 0.1) to the interested users. You can freely download and install the software following the simple instruction. Since it is the trial version, we try our best to make the software installation easily and smoothly. The download link is as follows:
https://drive.google.com/drive/folders/18kYcnYeOUrg9rK-YQj_bPdzD39_DlB6U?usp=sharing
If you have any question or feedback, please freely contact us at: [email protected]
https://drive.google.com/drive/folders/18kYcnYeOUrg9rK-YQj_bPdzD39_DlB6U?usp=sharing
If you have any question or feedback, please freely contact us at: [email protected]